
How does a Willow robot navigate?
The Willow robot uses a camera to navigate through the world. Just like humans use their eyes to find their way around, your robot looks at the world and decides where to go.
Situational awareness
When you stand on your lawn and look around as a human, you have a rough idea of where you are. You estimate the distance to the border and use large items like trees, walls, hedges, and buildings to know where you are. You don’t have an exact location, like in centimeter precision, but you roughly know whether you are in a certain zone, how far from the house, and whether you are close to the border or not.
Your robot works the exact same way. That is why the first thing you have to do is show her around. Take her on a walk around the garden so she can memorize where there are remarkable objects. When at a certain point later she needs to know where she is, she will look around until she finds points that she recognizes and determine her approximate location. That location is further finetuned by means of the GPS she has on board. This level of navigation is used to determine in which zone she is, how large the surface to mow is, and in what direction she can find her charging station.
To navigate in this way, Willow builds a 3D map of your garden.

Surface detection
Imagine you are walking around a garden and approaching a pool. In order not to fall into it, you will look down where you put your feet. With centimeter precision, you will approach the pool.
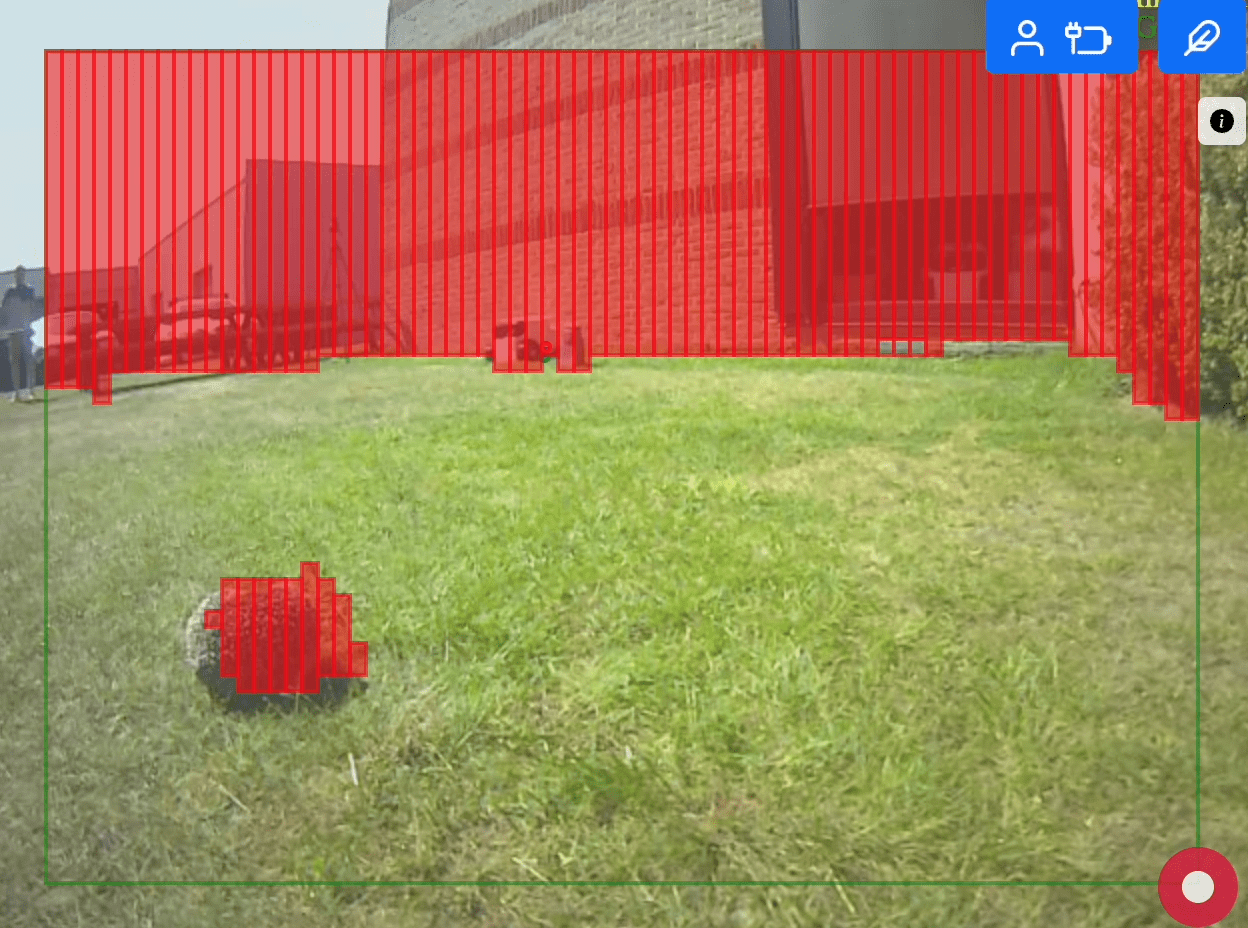
Once again your robot does the same. She will use surface detection artificial intelligence to recognize the type of surface she sees in front of her, distinguishing between grass, weeds, flowers, water, floor, and more categories. Based on what she sees she will continue to mow (grass) or stop (e.g. water or an obstacle).
This is centimeter precise, and she will stay 20 centimeters away from where she is not allowed to mow. You can change that distance if you want. Added to this, is a second artificial intelligence recognition tool (a neural network this is called) that identifies larger objects. This tool identifies people, cars and also your charging station. This way she can stop mowing when people are approaching, avoid cars (e.g. when she has to cross a driveway), and precisely locate her charging station.Now you understand the basics of your robot’s navigation skills.
In the picture you can see the world through Willow's eyes. The AI layer over the image shows what the robot can identify.