
Wie navigiert ein Willow-Roboter?
Der Willow-Roboter verwendet eine Kamera, um durch die Welt zu navigieren. So wie Menschen ihre Augen benutzen, um sich zurechtzufinden, schaut sich Ihr Roboter die Welt an und entscheidet, wohin er gehen soll.
Situationsbewusstsein
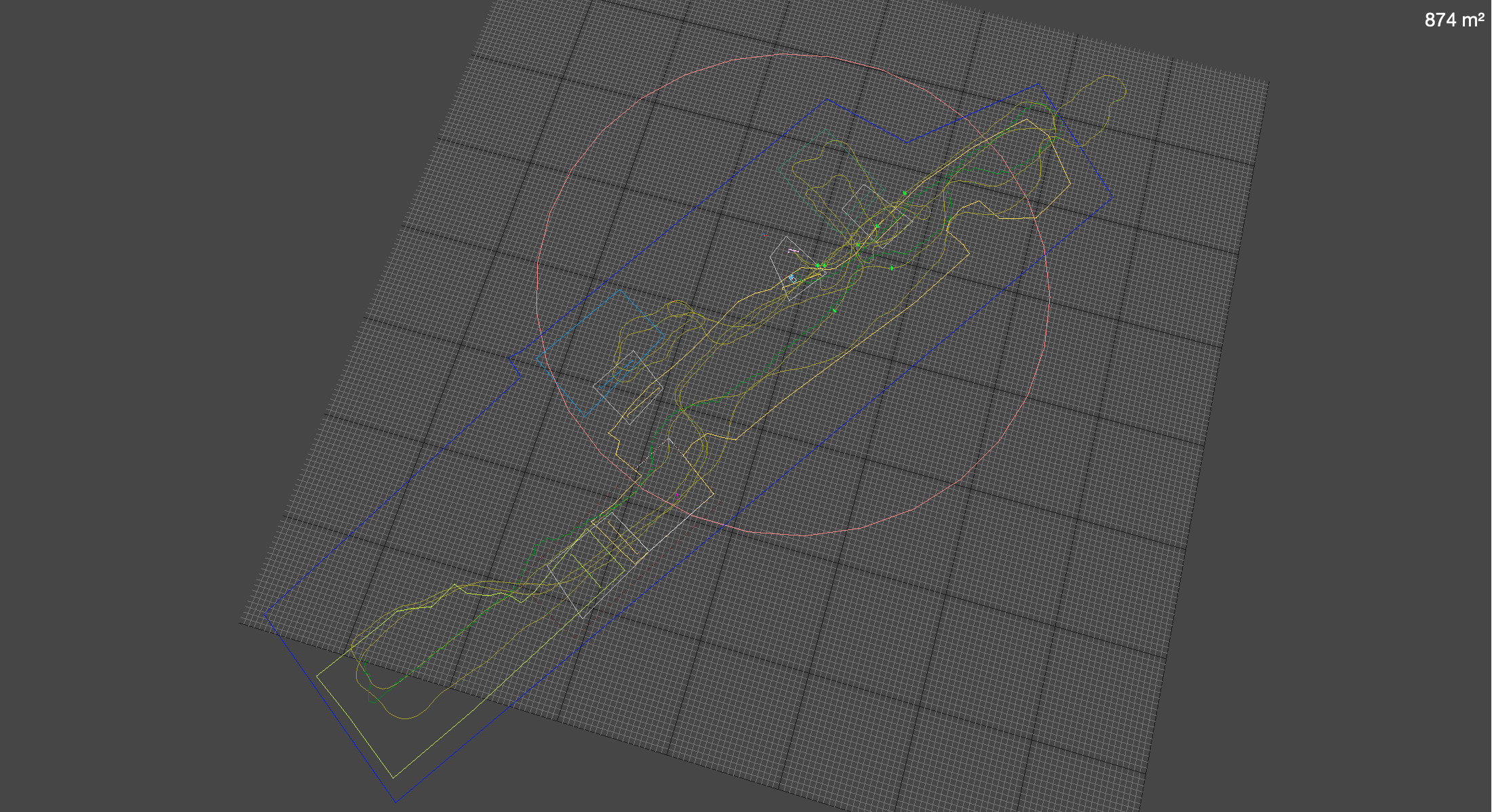
Wenn Sie als Mensch auf Ihrem Rasen stehen und sich umsehen, haben Sie eine ungefähre Vorstellung davon, wo Sie sich befinden. Sie schätzen die Entfernung zur Grenze und nutzen große Objekte wie Bäume, Mauern, Hecken und Gebäude, um zu wissen, wo Sie sich befinden. Sie haben keine exakte Position, etwa auf den Zentimeter genau, aber Sie wissen ungefähr, ob Sie sich in einer bestimmten Zone befinden, wie weit vom Haus entfernt sind und ob Sie sich in der Nähe der Grenze befinden oder nicht.
Ihr Roboter arbeitet genau so. Deshalb müssen Sie ihn zunächst einmal herumführen. Machen Sie einen Spaziergang durch den Garten, damit sie sich merken kann, wo sich bemerkenswerte Objekte befinden. Wenn sie später einmal wissen muss, wo sie sich befindet, wird sie sich umsehen, bis sie Punkte findet, die sie wiedererkennt, und ihren ungefähren Standort bestimmen. Dieser Standort wird mit Hilfe des GPS, das sie an Bord hat, weiter verfeinert. Mit Hilfe dieser Navigationsebene kann sie feststellen, in welchem Bereich sie sich befindet, wie groß die zu mähende Fläche ist und in welcher Richtung sie ihre Ladestation finden kann.
Erkennung der Oberfläche
Stellen Sie sich vor, Sie gehen durch einen Garten und nähern sich einem Teich. Um nicht hineinzufallen, schauen Sie nach unten, wo Sie Ihre Füße hinsetzen. Mit Zentimetergenauigkeit nähern Sie sich dem Becken.
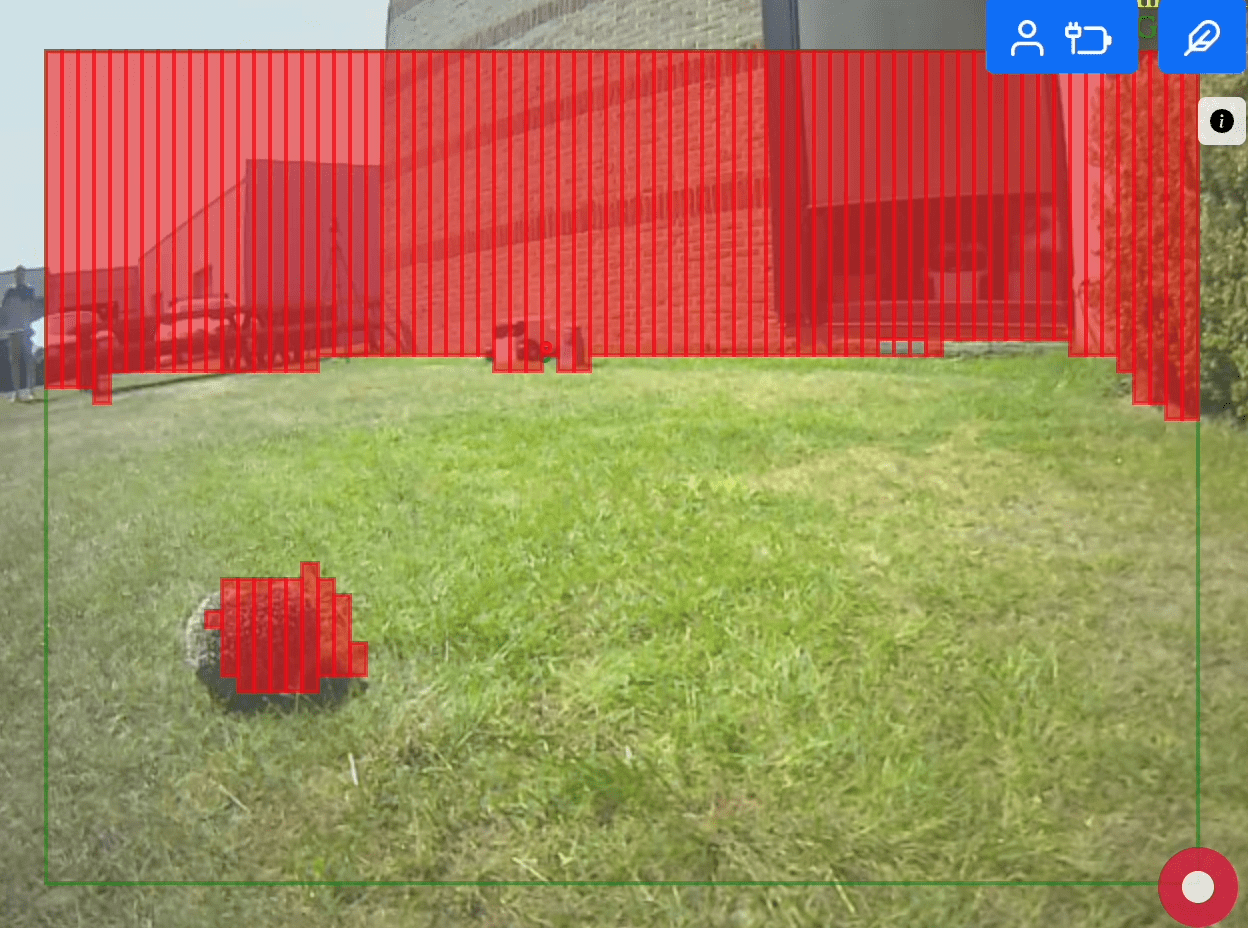
Ihr Roboter macht das Gleiche. Er nutzt die künstliche Intelligenz der Oberflächenerkennung, um die Art der Oberfläche zu erkennen, die er vor sich sieht, und unterscheidet zwischen Gras, Unkraut, Blumen, Wasser, Boden und anderen Kategorien. Je nachdem, was sie sieht, mäht sie weiter (Gras) oder hält an (z. B. Wasser oder ein Hindernis).
Sie mäht zentimetergenau und hält einen Abstand von 20 Zentimetern zu den Stellen ein, an denen sie nicht mähen darf. Hinzu kommt ein zweites Erkennungsinstrument der künstlichen Intelligenz (ein so genanntes neuronales Netz), das größere Objekte erkennt. Dieses Tool erkennt Menschen, Autos und auch Ihre Ladestation. Auf diese Weise kann er aufhören zu mähen, wenn sich Menschen nähern, Autos ausweichen (z. B. wenn er eine Einfahrt überqueren muss) und seine Ladestation genau lokalisieren.
