
Hoe navigeert een Willow robot?
De Willow robot gebruikt een camera om door de wereld te navigeren. Net zoals mensen hun ogen gebruiken om hun weg te vinden, kijkt je robot naar de wereld en beslist waar ze naartoe gaan.
Omgevingsbewustzijn
Als je als mens op je gazon staat en om je heen kijkt, heb je een globaal idee van waar je bent. Je schat de afstand tot de grens en gebruikt grote voorwerpen zoals bomen, muren, heggen en gebouwen om te weten waar je bent. Je hebt geen exacte locatie, op de centimeter nauwkeurig, maar je weet ongeveer of je in een bepaalde zone bent, hoe ver je van je huis bent en of je dicht bij de grens bent of niet.
Je robot werkt op precies dezelfde manier. Het eerste dat je daarom moet doen, is haar een rondleiding geven. Maak met haar een wandeling door de tuin, zodat ze kan onthouden waar er opmerkelijke voorwerpen staan. Wanneer ze later op een bepaald moment moet weten waar ze is, zal ze rondkijken tot ze punten vindt die ze herkent en haar locatie bij benadering bepaalt. Die locatie wordt verder verfijnd met behulp van de GPS die zij aan boord heeft. Dit niveau van navigatie wordt gebruikt om te bepalen in welke zone ze zich bevindt, hoe groot het te maaien oppervlak is en in welke richting ze haar laadstation kan vinden.
Om op deze manier te navigeren bouwt jouw robot een 3D kaart.

Beeldherkenning
Stel je voor dat je in een tuin rondloopt en een zwembad nadert. Om er niet in te vallen, kijk je naar beneden waar je je voeten neerzet. Met centimeterprecisie nader je het zwembad.
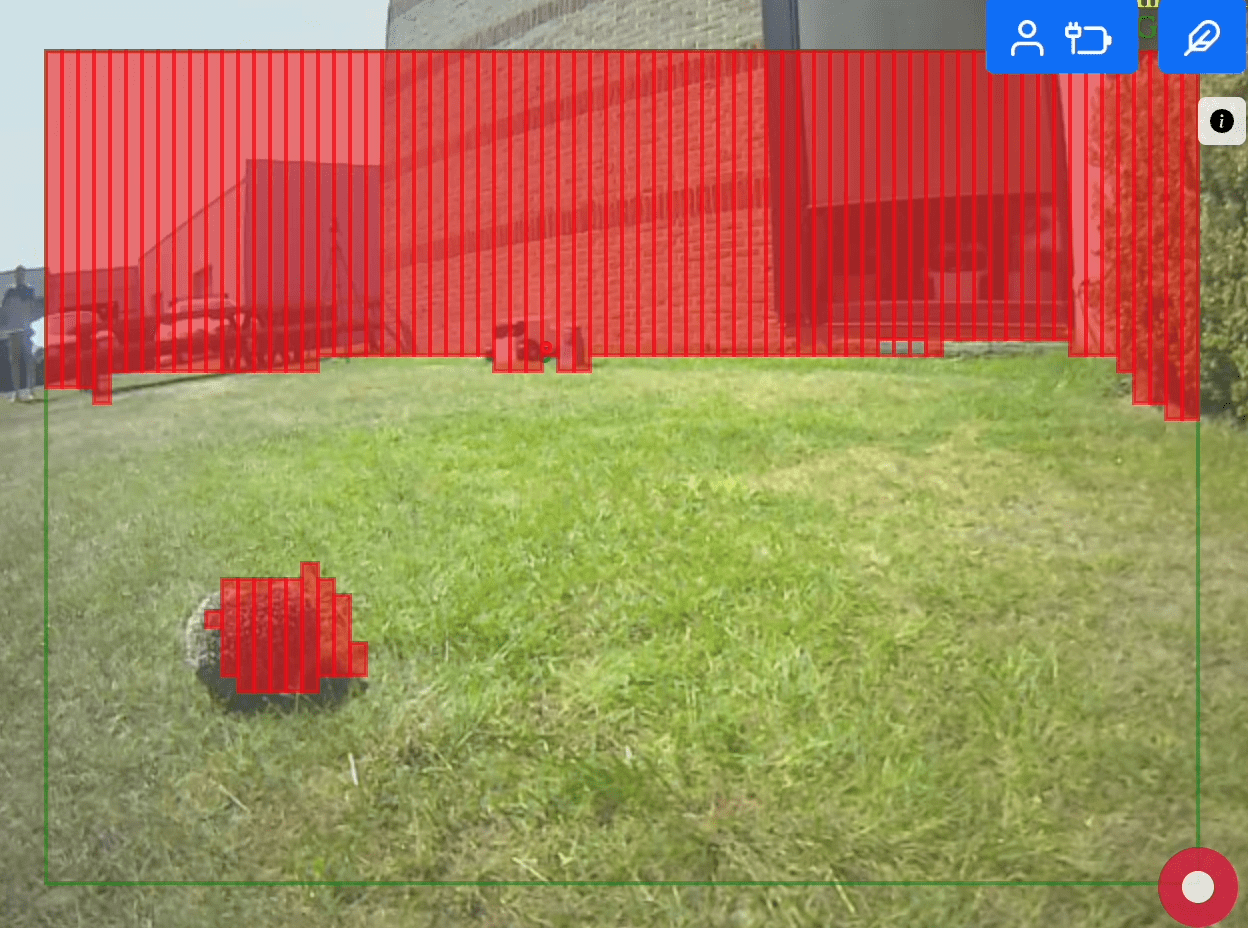
Opnieuw doet je robot hetzelfde. Ze zal gebruik maken van kunstmatige intelligentie voor oppervlaktedetectie om het type oppervlak dat ze voor zich ziet te herkennen, waarbij ze onderscheid maakt tussen gras, onkruid, bloemen, water, vloer, en nog meer categorieën. Op basis van wat ze ziet zal ze verder maaien (gras) of stoppen (bv. water of een obstakel).
Dit is centimeter precies, en ze zal 20 centimeter uit de buurt blijven van waar ze niet mag maaien. Je kunt die afstand veranderen als je wilt. Daar komt nog een tweede kunstmatige intelligentie, namelijk een herkenningshulpmiddel (een neuraal netwerk heet dat) dat grotere voorwerpen identificeert. Deze tool herkent mensen, auto's en ook je laadstation. Op die manier kan ze stoppen met maaien als er mensen naderen, auto's ontwijken (bv. als ze een oprit moet oversteken) en haar laadstation precies lokaliseren.
