
Comment un robot Willow navigue-t-elle?
Le robot Willow utilise une caméra pour se déplacer dans le monde. Tout comme les humains utilisent leurs yeux pour s'orienter, votre robot regarde le monde et décide où aller.
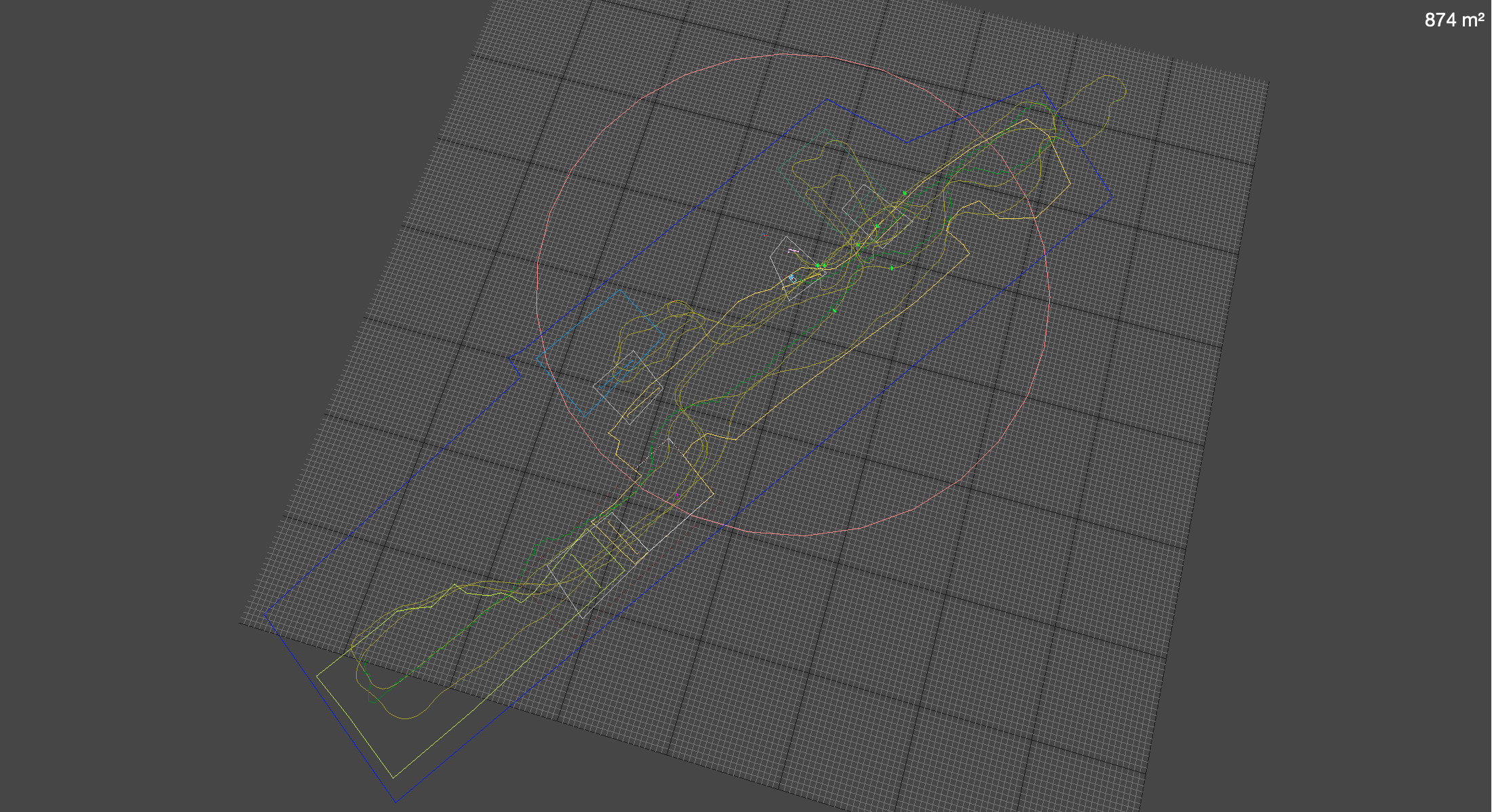
Conscience situationnelle
Lorsque vous vous tenez sur votre pelouse et regardez autour de vous en tant qu'humain, vous avez une idée approximative de l'endroit où vous vous trouvez. Vous estimez la distance jusqu'à la frontière et vous utilisez de grands éléments comme les arbres, les murs, les haies et les bâtiments pour savoir où vous êtes. Vous n'avez pas une localisation exacte, au centimètre près, mais vous savez approximativement si vous êtes dans une certaine zone, à quelle distance de la maison et si vous êtes proche de la frontière ou non.
Votre robot fonctionne exactement de la même manière. C'est pourquoi la première chose que vous devez faire est de lui montrer les environs. Faites-lui faire un tour dans le jardin pour qu'il puisse mémoriser les endroits où se trouvent des objets remarquables. Lorsqu'à un moment donné, elle aura besoin de savoir où elle se trouve, elle regardera autour d'elle jusqu'à ce qu'elle trouve des points qu'elle reconnaît et détermine sa position approximative. Cette localisation est encore affinée grâce au GPS qu'elle a à bord. Ce niveau de navigation est utilisé pour déterminer dans quelle zone elle se trouve, quelle est la taille de la surface à tondre et dans quelle direction elle peut trouver sa station de recharge.
Détection de la surface
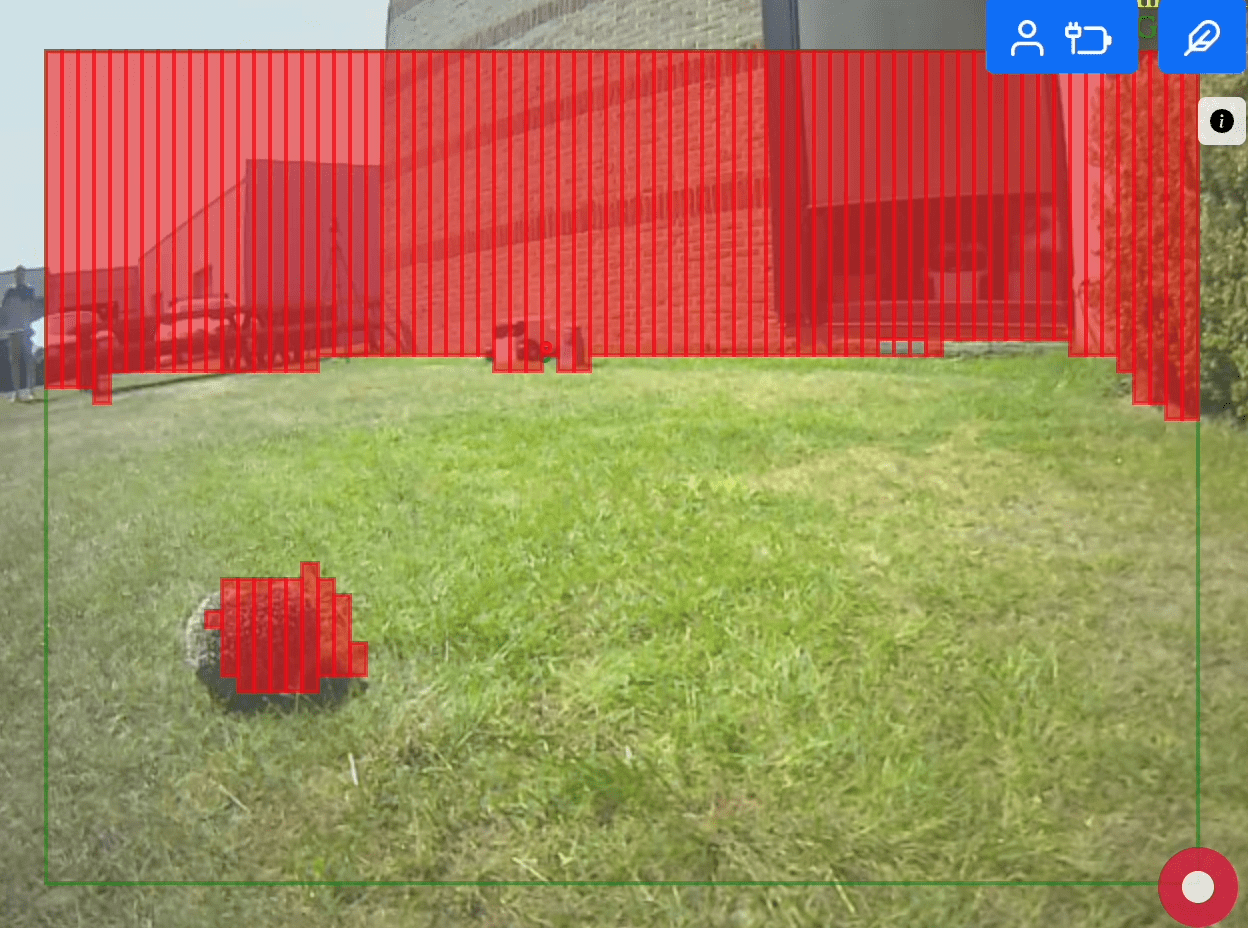
Imaginez que vous vous promenez dans un jardin et que vous vous approchez d'une piscine. Afin de ne pas tomber dedans, vous regarderez vers le bas, là où vous posez vos pieds. Avec une précision centimétrique, vous vous approchez de la piscine.
Une fois de plus, votre robot fait de même. Il utilisera l'intelligence artificielle de détection de surface pour reconnaître le type de surface qu'il voit devant lui, en distinguant l'herbe, les mauvaises herbes, les fleurs, l'eau, le sol, et d'autres catégories encore. En fonction de ce qu'elle voit, elle continuera à tondre (herbe) ou s'arrêtera (eau ou obstacle, par exemple).
La précision est de l'ordre du centimètre, et elle restera à 20 centimètres de l'endroit où elle n'est pas autorisée à tondre. Vous pouvez modifier cette distance si vous le souhaitez.Ajouté à cela, il y a un deuxième outil de reconnaissance d'intelligence artificielle (un réseau de neurones cela s'appelle) qui identifie les objets plus grands. Cet outil identifie les personnes, les voitures et aussi votre station de recharge. Ainsi, il peut arrêter de tondre lorsque des personnes s'approchent, éviter les voitures (par exemple, lorsqu'il doit traverser une allée) et localiser précisément sa station de recharge.
